
| Fahrzeugtypen | |
|
Grundsätzlich kann für die Anwendung einer Fahrzeugsteuerung mit dem ARDUINO jedes Modellfahrzeug verwendet werden, bei dem die Drehrichtung und die Geschwindigkeit des Antriebes gesteurt werden kann. 1. Ein einfaches Räderfahrzeug |
|
 |
|
|
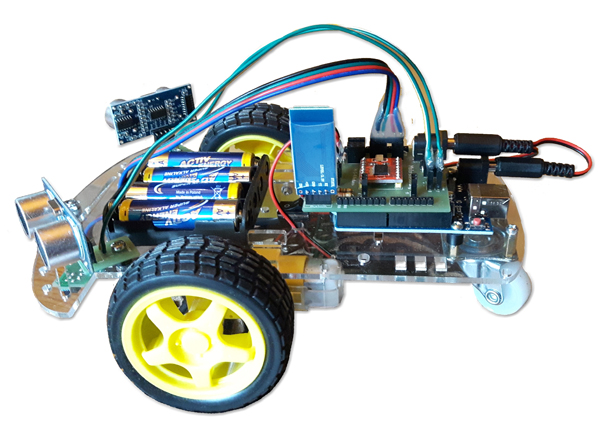
Jedes der beiden Räder vorne wird von einem eigenen Getriebemotor angetrieben, sodass sich für die Steuerung sehr gute Möglichkeiten ergeben. Hinten hat das Fahrzeug nur ein Stützrad in Form einer Rollkugel.
Der Bausatz "Roboter Chassis" ist bei Physcal Computing um ca. 20 Euro zu bekommen, der Zusammenbau erfolgt nur mit Schrauben und ist recht einfach. In den Grundplatten sind viele Löcher und Schlitze für das Anbringen von Sensoren oder weiteren Aufbauten vorhanden. Neue Version des Fahrzeuges ab 2016 |
|
 |
|
| 2. Raupenfahrzeug | |
 |
|
|
Es handelt sich dabei um den beliebten Bausatz "Raupenfahrzeug mit Kabelfernsteuerung" von Winkler-Schulbedarf, der ca. 14 Euro kostet. Auf dem Bild ist noch die alte Version des Fahrzeuges zu sehen, inzwischen wurde der Bausatz überarbeitet und verbessert.
Modus 1: Der ARDUINO mit dem Steuermodul wird auf dem Fahrzeug montiert und das Fahrzeug ist mit einem längeren USB-Kabel mit dem Computer verbunden. Diese Version ist am 2. Bild beim Raupenfahrzeug zu sehen. Da sich der ARDUINO-Baustein am Fahrzeug befindet, können Sensoren vom Fahrzeug leicht ins Programm eingebunden werden. Modus 2: Der ARDUNIO samt Steuerungsmodul ist extern platziert und das Fahrzeug ist nur mit einem 4-poligen Kabel für die Motorsteuerung verbunden. Diese Version auf dem ersten Bild beim Räderfahrzeug zu sehen. Man benötigt dazu nur eine Verlängerung des Kabels zu den Motoren, im Raupenfahrzeugbausatz ist dieses Kabel bereits vorhanden. Modus 3: Das Fahrzeug ist nicht mit dem Computer verbunden. Dazu muss das Programm in compilierter Form auf den ARDUINO überspielt werden und bleibt dann dort erhalten. Dies ist aber mit der Programiiersprache Scratch4Arduino nicht möglich. Dazu muss man die Standardprogrammierung des ARDUINO nutzen, was aber nicht ganz einfach ist. |
|
|
Das sensorgesteuerte Fahrzeug - Video auf YOUTUBE |
|
